Faire de la programmation ? Il y a plus simple !

La programmation, qui prend beaucoup de temps, fait également partie du monde numérique. On peut certes déjà « enseigner » ou « paramétrer » beaucoup de choses, mais n’est-ce pas encore plus simple ? Des recherches sont en cours à la Haute école spécialisée bernoise (HESB) et les résultats sont étonnants.
De plus en plus de robots travaillent dans les ateliers de production du monde entier. En 2020, 384 000 nouveaux robots ont été livrés dans le monde entier, ce qui porte à plus de trois millions le nombre de robots en service, peut-on lire dans le rapport « World Robotics 2021 » de l’International Federation of Robotics (IFR). Il ne fait aucun doute que les robots industriels conventionnels sont majoritaires. Mais que les cobots ne représentent encore qu’une part marginale du marché est surprenant. En effet, parmi les 384 000 robots vendus, seuls 22 000 étaient des cobots, soit à peine six pour cent.
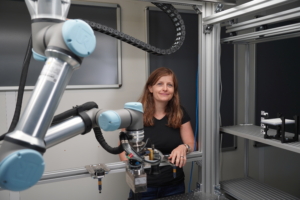
Prof. Dr Sarah Dégallier Rochat dans le laboratoire de la HESB à Bienne. Image : Eugen Albisser
La professeure Sarah Rochat de la Haute école spécialisée bernoise n’est pas particulièrement étonnée. « Avec les cobots, on a certes assisté à une démocratisation des robots ; mais les cobots ne sont pas aussi faciles à utiliser qu’on le souhaiterait »
L’entreprise Reichelt parvient à une conclusion similaire après un sondage. Certes, les cobots sont effectivement en train de se développer, mais l’une des plus grandes difficultés pour l’introduction de robots est que leur installation est liée à des dépenses élevées. Pour un quart des personnes interrogées, il est toutefois essentiel de veiller, lors du choix des robots, à ce qu’ils soient facilement et rapidement reprogrammables (voir aussi l’encadré : Les cobots arrivent !).
Les cobots doivent devenir encore plus flexibles
L’objectif de l’utilisation de robots collaboratifs est principalement de travailler aux côtés de l’homme dans la production et les environnements industriels. Les cobots et les humains doivent travailler ensemble de manière transparente. Contrairement aux robots industriels, cela exige qu’ils puissent s’adapter plus rapidement à de nouvelles tâches. Les fabricants de cobots ont certainement fait un bon travail préparatoire. L’installation des cobots peut souvent être réalisée par une fonction d’apprentissage, ce qui constitue déjà une simplification considérable. « Pour les processus simples, cela peut effectivement fonctionner rapidement. Mais dès qu’un peu d’adaptabilité est nécessaire, c’est-à-dire que la situation devient plus complexe, alors cela ne fonctionne plus », explique Sarah Rochat. Et alors, premièrement, on perd beaucoup de temps et il faudrait avoir un expert en robotique ou un intégrateur sur place. Mais de nos jours, avec l’augmentation des mélanges et des petites séries, la flexibilité est indispensable et les entreprises souhaiteraient confier plus de responsabilités aux non-professionnels de la robotique.
Anticiper et gérer les probabilités
La vision est donc qu’une cellule robotique soit construite de manière si simple que cette adaptabilité soit atteinte plus rapidement. Les cobots ne devraient donc plus être laborieusement programmés. En principe, les cobots devraient donc anticiper beaucoup de choses et devraient également être capables de gérer de manière robuste les imprécisions des capteurs ou du modèle. Et surtout, ils devraient pouvoir être programmés de la manière la plus simple qui soit, qu’il s’agisse d’un robot Fanuc dans la cellule ou d’un cobot de la marque Universal Robots, ABB, Bosch Rexroth ou Stäubli. Et les autres systèmes intégrés ne doivent pas non plus connaître de problèmes d’interface.
C’est précisément ce à quoi s’emploient les laboratoires de la Haute école spécialisée bernoise. Les démonstrateurs déjà installés dans les laboratoires sont chacun équipés d’un robot (Fanuc, Universal Robots, Mecademic) et sont dotés de systèmes de traitement d’images intelligents. Ces derniers modélisent également la zone de travail sur la base d’informations a priori telles que des fichiers CAO ou des descriptions de processus.
« Mais il est également important que ce jumeau numérique, que nous représentons avec cette modélisation, puisse réagir en temps réel aux informations », explique Sarah Rochat. Cela signifie qu’un utilisateur doit toujours voir immédiatement ce que le robot va faire. Ce n’est généralement pas encore le cas aujourd’hui. En effet, si une erreur se produit, on ne sait pas à quoi elle peut être due. Un exemple : le robot ne reconnaît pas que deux objets sont simplement trop proches l’un de l’autre ; il les perçoit comme un seul objet. Cet objet est alors affiché et l’utilisateur voit immédiatement à l’écran que le robot ne reconnaît qu’un seul objet. Il peut alors modifier l’éclairage du système de vision ou adapter les paramètres.
De l’utilisateur passif à l’utilisateur actif
On dirait encore qu’il faut malgré tout une certaine expertise. « C’est le cas », dit Sarah Rochat, « pour exploiter tout le potentiel, il faut bien sûr de l’expertise. C’est pourquoi nous créons des tutoriels simples et c’est là que l’on peut toujours aller plus loin et acquérir cette expertise » Mais la barrière d’entrée est faible et il est possible d’approfondir ses connaissances en continu et de la manière la plus simple possible. Rochat : « Derrière cela se cache aussi un problème fondamental que nous voulons aborder. L’opérateur est normalement plutôt passif. Lorsqu’une erreur se produit, il ne la résout pas parce qu’il pense qu’il ne peut pas le faire. Ou parce que les interfaces de programmation sont conçues de manière à ce que l’opérateur puisse intervenir le moins possible. C’est ainsi que l’on veut éviter les erreurs. Nous nous sommes fixé pour objectif de donner plus de confiance aux utilisateurs, de les rendre plus sûrs dans l’utilisation des robots. Grâce à ces tutoriels, ils ont une idée du fonctionnement du système. Mais le minimum doit suffire à lui donner confiance »


Fig. 1 : Captures d’écran de l’interface de l’application.
Pick Cube and place on red square
Mais comment fonctionne une programmation simple ? « Elle fonctionne en langage « naturel », c’est-à-dire comme un opérateur expliquerait quelque chose à un collègue », explique Sarah Rochat. On puise l’élément approprié dans les différents niveaux, comme par exemple les tâches, les compétences ou les propriétés de l’appareil, et on les combine. Au final, cela se lit comme suit : Pick Cube and place on red square. Répéter jusqu’à ce que la palette soit pleine. Les mots en italique sont les paramètres ajoutés par l’utilisateur.
Tout fonctionne déjà de manière assez fluide sur les démonstrateurs mis en place. Ils seront testés à partir de janvier 2023 dans une entreprise qui a donné un coup de pouce à ce projet. Mais ce projet est loin d’être l’apanage de cette seule entreprise. Une spin-off du nom d’Auto-Mate Robotics (anciennement « Power Up ! ») est déjà intégrée, qui poursuit les résultats de la recherche et développe la cellule robotique afin que l’industrie puisse en profiter (voir aussi l’encadré « Promotion de la Gebert Rüf Stiftung »).
La start-up « Auto-Mate Robotics » (anciennement « Power Up ! ») reçoit le soutien « First Ventures » de Gebert Rüf Stiftung
Leur idée a convaincu : Lucas Renfer, Christian Wyss et Charly Blanc (en photo de couverture) reçoivent pour leur start-up Auto-Mate Robotics CHF 150’000 de promotion de la part de Gebert Rüf Stiftung. Avec Auto-Mate Robotics ils veulent développer un système d’automatisation flexible et collaboratif. Celui-ci doit être utilisé dans des entreprises qui fabriquent des produits en petites quantités et avec de nombreuses variantes différentes. Dans ce domaine, on mise encore souvent sur le travail manuel, car les solutions d’automatisation traditionnelles ne sont pas financièrement rentables. Un système robotique adaptable et facilement programmable a le potentiel de réduire les coûts de production tout en élargissant les compétences et les tâches des collaborateurs.
Les cobots arrivent – mais il y a aussi des obstacles
Depuis longtemps, les robots et les assistants intelligents ne sont plus rares dans les entreprises suisses. Pourtant, leur potentiel d’utilisation ne semble pas encore être pleinement exploité. Reichelt Elektronik a interrogé à ce sujet plus de 1500 entreprises de l’industrie, dont 200 en Suisse. Pas moins de 81 pour cent d’entre elles sont d’accord pour dire que l’utilisation de robots contribue à augmenter la compétitivité. Le domaine d’activité cité est à près de 52 % la production et la fabrication. Les tâches concrètes sont les suivantes : assembler ou charger des machines, effectuer des tâches d’emballage, souder et également palettiser, empiler, transporter.
Bien que les robots soient de plus en plus populaires, l’une des plus grandes difficultés rencontrées lors de leur introduction réside dans le fait que leur installation est très coûteuse (47 %). L’entretien et la maintenance constituent un obstacle tout aussi important (45 %).
Pour que l’implémentation des robots soit un succès, les entreprises suisses souhaitent principalement que les machines intelligentes soient flexibles. 73 % estiment qu’il est important que le robot soit polyvalent. De même, plus d’un quart (27 %) des personnes interrogées estiment qu’il est essentiel de veiller à ce que les robots soient facilement et rapidement (re)programmables lors de leur sélection.
Cet article est paru dans le magazine spécialisé pour l’industrie « Technik & Wissen « .

![]() Eugen Albisser est le fondateur, co-owner et rédacteur en chef du magazine spécialisé "Technik und Wissen".
Eugen Albisser est le fondateur, co-owner et rédacteur en chef du magazine spécialisé "Technik und Wissen".




 Contributions en tant que RSS
Contributions en tant que RSS
Laisser un commentaire
Rejoindre la discussion?N’hésitez pas à contribuer !